Model Predictive Control (MPC) is the core algorithmic approach behind Fourdeg's smart heating optimization. By combining real-time data with predictive models, MPC enables heating systems to anticipate future needs and act proactively rather than reactively.
What is Model Predictive Control?
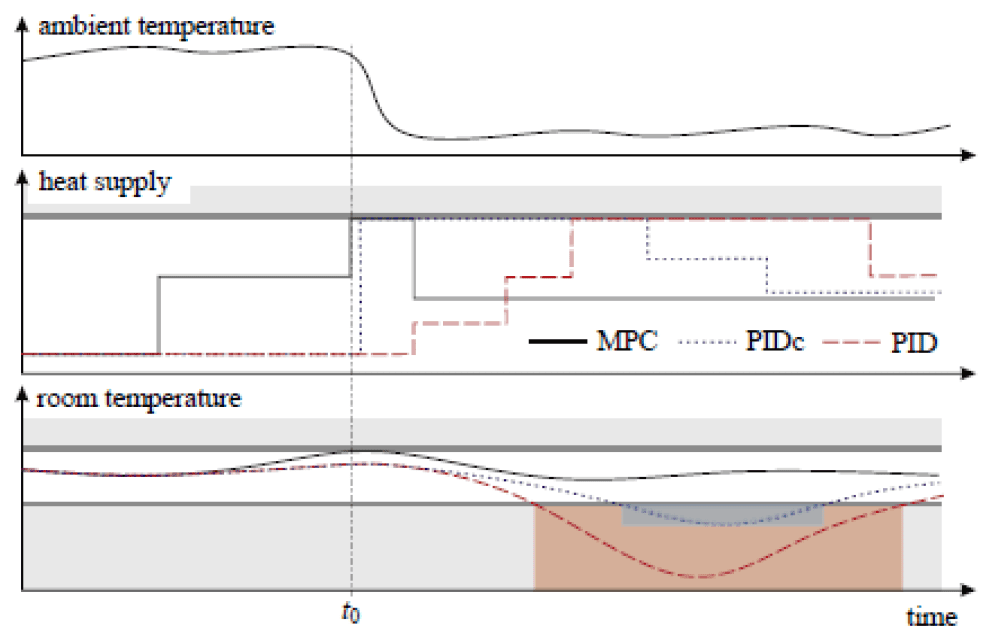
MPC is an advanced control strategy that uses a mathematical model of a building's thermal behavior to predict future temperatures and optimize heating actions. Unlike traditional thermostats that simply react to temperature changes, MPC looks ahead — considering weather forecasts, building thermal mass, and occupancy patterns to determine the optimal heating strategy.
How MPC Works in Fourdeg
- Building model: The system creates a digital model of each building's thermal characteristics — how quickly it heats up, cools down, and responds to external conditions
- Weather integration: Local weather forecasts are incorporated to predict future heating demand
- Optimization horizon: The algorithm optimizes over a rolling time window, continuously updating its predictions
- Constraint handling: Temperature comfort limits, energy costs, and equipment constraints are all factored in
- Continuous learning: The model improves over time as it gathers more data about building behavior
Benefits of MPC in Heating
- Anticipates temperature drops before they happen
- Pre-heats buildings using cheap energy during off-peak hours
- Reduces energy waste from overshooting target temperatures
- Maintains stable, comfortable indoor conditions
- Achieves 20-35% energy savings compared to conventional control
"Model Predictive Control turns heating from a reactive process into a proactive, intelligent system that anticipates needs before they arise."