Model Predictive Control (MPC) er den sentrale algoritmiske tilnærmingen bak Fourdeg s smarte varmeoptimalisering. Ved å kombinere sanntidsdata med prediktive modeller, lar MPC varmesystemer forutse fremtidige behov og handle proaktivt i stedet for reaktivt.
Hva er Model Predictive Control ?
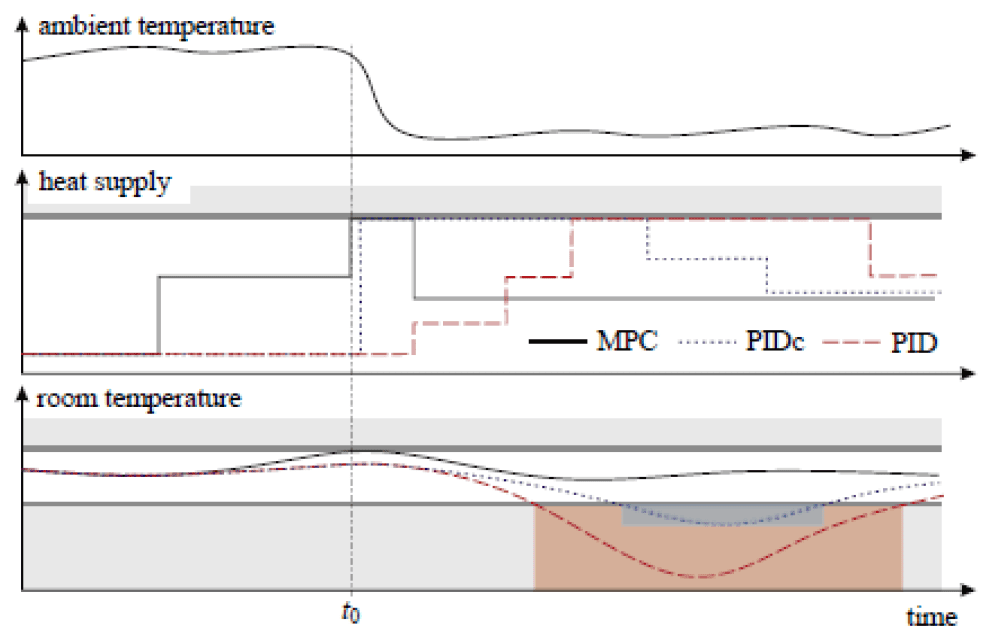
MPC er en avansert kontrollstrategi som bruker en matematisk modell av en bygnings termiske oppførsel for å forutsi fremtidige temperaturer og optimalisere oppvarmingshandlinger. I motsetning til tradisjonelle termostater som bare reagerer på temperaturendringer, ser MPC fremover – og tar hensyn til værmeldinger, bygningens termiske masse og bruksmønstre for å bestemme den optimale oppvarmingsstrategien.
Hvordan MPC fungerer i Fourdeg
- Bygningsmodell: Systemet lager en digital modell av hver bygnings termiske egenskaper – hvor raskt den varmes opp, kjøles ned og reagerer på ytre forhold.
- Værintegrasjon: Lokale værmeldinger er integrert for å forutsi fremtidig oppvarmingsbehov
- Optimaliseringshorisont: Algoritmen optimaliserer over et rullerende tidsvindu og oppdaterer kontinuerlig prediksjonene sine.
- Håndtering av begrensninger: Temperaturkomfortgrenser, energikostnader og utstyrsbegrensninger tas med i betraktningen.
- Kontinuerlig læring: Modellen forbedres over tid etter hvert som den samler inn mer data om bygningsatferd
Fordeler med MPC i oppvarming
- Forutser temperaturfall før de skjer
- Forvarmer bygninger med billig energi utenom rushtiden
- Reduserer energisvinn fra overskridelse av måltemperaturer
- Opprettholder stabile og komfortable innendørsforhold
- Oppnår 20–35 % energibesparelser sammenlignet med konvensjonell styring
" Model Predictive Control gjør oppvarming om fra en reaktiv prosess til et proaktivt, intelligent system som forutser behov før de oppstår.