Model Predictive Control MPC) est l'approche algorithmique fondamentale qui sous-tend l'optimisation intelligente du chauffage Fourdeg. En combinant des données en temps réel avec des modèles prédictifs, le MPC permet aux systèmes de chauffage d'anticiper les besoins futurs et d'agir de manière proactive plutôt que réactive.
Qu'est-ce que Model Predictive Control?
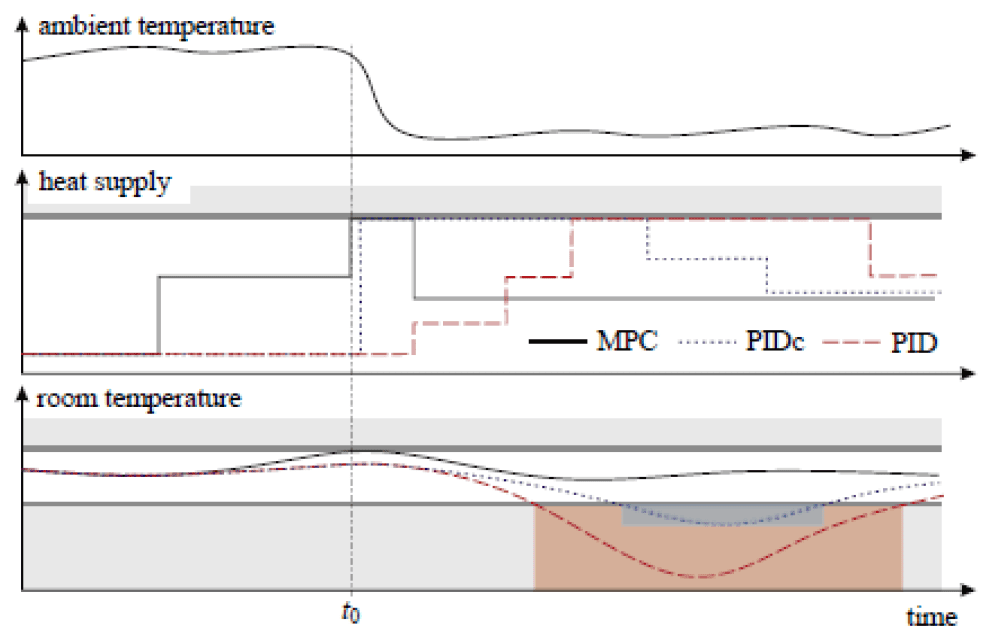
Le MPC est une stratégie de régulation avancée qui utilise un modèle mathématique du comportement thermique d'un bâtiment pour prévoir les températures futures et optimiser les actions de chauffage. Contrairement aux thermostats traditionnels qui se contentent de réagir aux variations de température, le MPC anticipe l'évolution de la situation : il prend en compte les prévisions météorologiques, la masse thermique du bâtiment et les habitudes d'occupation pour déterminer la stratégie de chauffage optimale.
Comment fonctionne le MPC dans Fourdeg
- Modèle du bâtiment : le système crée un modèle numérique des caractéristiques thermiques de chaque bâtiment — sa vitesse de chauffage, de refroidissement et sa réaction aux conditions extérieures
- Intégration des données météorologiques : les prévisions météorologiques locales sont prises en compte pour estimer les besoins futurs en chauffage
- Horizon d'optimisation : l'algorithme effectue l'optimisation sur une fenêtre temporelle glissante, en mettant à jour ses prévisions en continu
- Prise en compte des contraintes : les limites de confort thermique, les coûts énergétiques et les contraintes liées aux équipements sont tous pris en compte
- Apprentissage continu : le modèle s'améliore au fil du temps à mesure qu'il recueille davantage de données sur le comportement du bâtiment
Avantages du MPC dans le domaine du chauffage
- Prévoyez les baisses de température avant qu'elles ne se produisent
- Préchauffe les bâtiments en utilisant de l'énergie bon marché pendant les heures creuses
- Réduit le gaspillage d'énergie lié au dépassement des températures de consigne
- Assure des conditions intérieures stables et confortables
- Permet de réaliser des économies d'énergie de 20 à 35 % par rapport à un système de régulation classique
«Model Predictive Control le chauffage, qui passe d'un processus réactif à un système proactif et intelligent capable d'anticiper les besoins avant même qu'ils ne se manifestent. »