Model Predictive Control MPC) on Fourdeg älykkään lämmityksen optimoinnin taustalla oleva keskeinen algoritminen menetelmä. Yhdistämällä reaaliaikaiset tiedot ennustemalleihin MPC mahdollistaa sen, että lämmitysjärjestelmät voivat ennakoida tulevia tarpeita ja toimia ennakoivasti sen sijaan, että ne reagoisivat tilanteisiin jälkikäteen.
Mitä on Model Predictive Control?
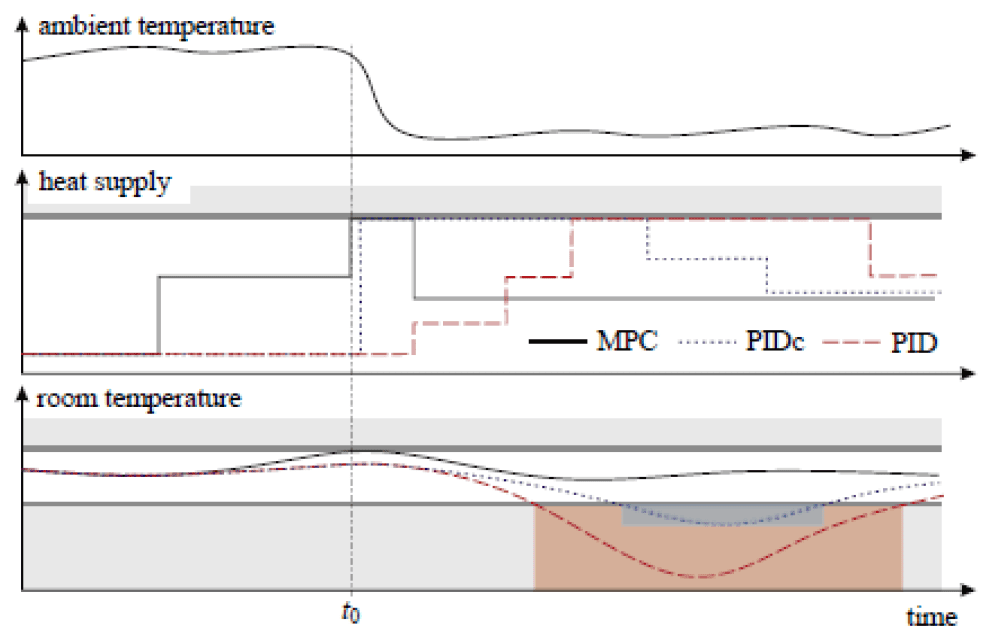
MPC on edistyksellinen ohjausmenetelmä, joka hyödyntää rakennuksen lämpökäyttäytymistä kuvaavaa matemaattista mallia tulevien lämpötilojen ennustamiseen ja lämmitystoimenpiteiden optimointiin. Toisin kuin perinteiset termostaatit, jotka vain reagoivat lämpötilan muutoksiin, MPC ennakoi tilannetta – se ottaa huomioon sääennusteet, rakennuksen lämpömassan ja käyttökuviot optimaalisen lämmitysstrategian määrittämiseksi.
MPC:n toiminta F Fourdegissä
- Rakennusmalli: Järjestelmä luo digitaalisen mallin kunkin rakennuksen lämpöominaisuuksista – siitä, kuinka nopeasti se lämpenee, jäähtyy ja reagoi ulkoisiin olosuhteisiin
- Säädatan integrointi: Paikalliset sääennusteet otetaan huomioon tulevan lämmitystarpeen ennustamisessa
- Optimointiaika: Algoritmi optimoi liikkuvalla aikavälillä ja päivittää ennusteitaan jatkuvasti
- Rajoitusten huomioon ottaminen: Lämpötilan mukavuusrajat, energiakustannukset ja laitteistojen rajoitukset otetaan kaikki huomioon
- Jatkuva oppiminen: Malli kehittyy ajan myötä, kun se kerää lisää tietoa rakennuksen käyttäytymisestä
MPC:n edut lämmityksessä
- Ennustaa lämpötilan laskun jo ennen kuin se tapahtuu
- Lämmittää rakennukset edullisella energialla hiljaisina aikoina
- Vähentää energian hukkaa, joka johtuu tavoitelämpötilan ylittymisestä
- Pitää sisäilman olosuhteet vakaana ja miellyttävänä
- Saavuttaa 20–35 %:n energiansäästön verrattuna perinteiseen ohjaukseen
"Model Predictive Control lämmityksen reaktiivisesta prosessista ennakoivaksi, älykkääksi järjestelmäksi, joka ennakoi tarpeet jo ennen niiden syntymistä."